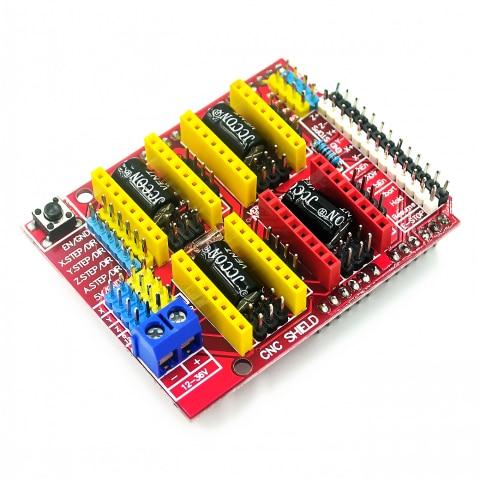
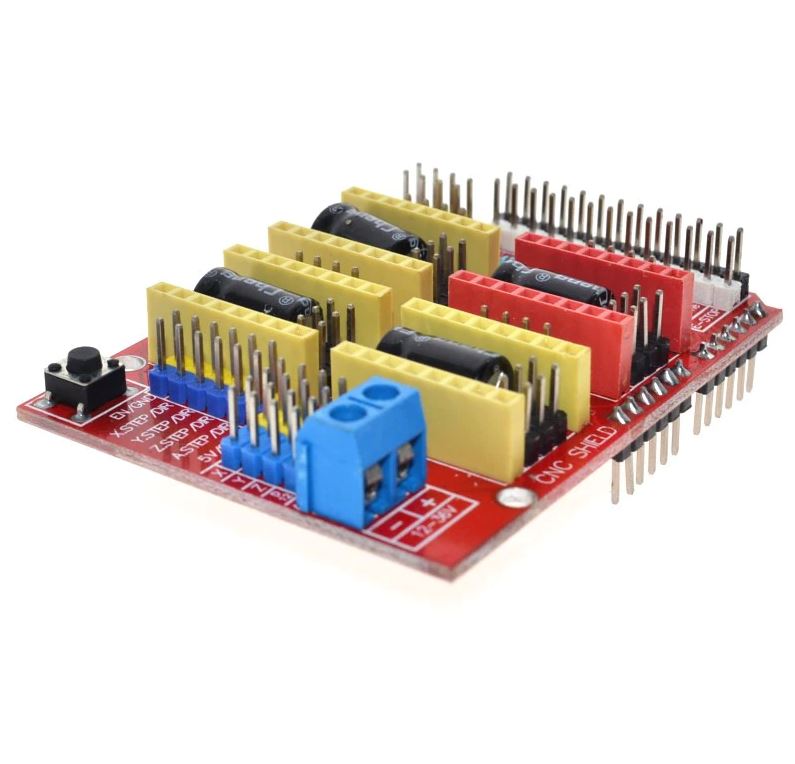

Táto expanzná doska je vhodná pre rycie stroje, 3D tlačiarne, apod., obsahuje štyri sloty pre A4988 drivery krokových motorov.
Balíček obsahuje jeden CNC Shield 3D tlačiarne pre Arduino.
Príklad:
//A következő egy egyszerű léptetőmotor-vezérlési eljárás:
# define EN 8 / / stepper motor enable , active low
# define X_DIR 5 / / / X -tengelyes léptetőmotor irányának vezérlése
# define Y_DIR 6 / / / y -tengelyes léptetőmotor irányvezérlése
# define Z_DIR 7 / / z tengely léptetőmotor irányának vezérlése
# define X_STP 2 / / x -tengelyes léptetőmotor vezérlése
# define Y_STP 3 / / y -tengelyes léptetőmotor vezérlése
# define Z_STP 4 / / z -tengelyes léptetőmotor vezérlése
/ *
/ / Funkció : lépés . funkció: a léptetőmotor irányának vezérlése , a lépések száma .
/ / / Paraméterek : dir irányvezérlés , dirPin megfelelő léptetőmotor DIR pin , stepperPin megfelelő léptetőmotor „ step ” pin , Step lépés száma lépés nincs visszatérési érték.
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / Az IO pinben használt léptetőmotor kimenetre van állítva.
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); / / Az X tengely motorja 1 gyűrűt fordít, a 200 lépés egy kör.
step (false, Y_DIR, Y_STP, 200); / / / y tengelymotor fordított 1 gyűrű, a 200 lépés egy kör.
step (false, Z_DIR, Z_STP, 200); / / / Z tengelymotor fordított 1 gyűrű, a 200 lépés egy kör.
delay (1000);
step (true, X_DIR, X_STP, 200); / / / X tengely motor előre 1 kör, a 200 lépés egy kör.
step (true, Y_DIR, Y_STP, 200); / / / y tengelymotor előre 1 kör, a 200 lépés egy kör.
step (true, Z_DIR, Z_STP, 200); / / / Z tengelymotor előre 1 körrel, a 200 lépés egy kör.
delay (1000);
}
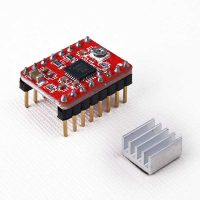
Megjegyzés: Az A4988 modul behelyezésekor ügyelni kell arra, hogy ne ellentétesen helyezzük be. A léptetőmotor bekötése a következőképpen:
2A, 2B egy csoport (piros, zöld), 1A, 1B egy csoport (kék, sárga), ha irányt akar változtatni, lehet változtatni a helyzetét egy csoport , például 2A, 2B kölcsönösen kicserélve.
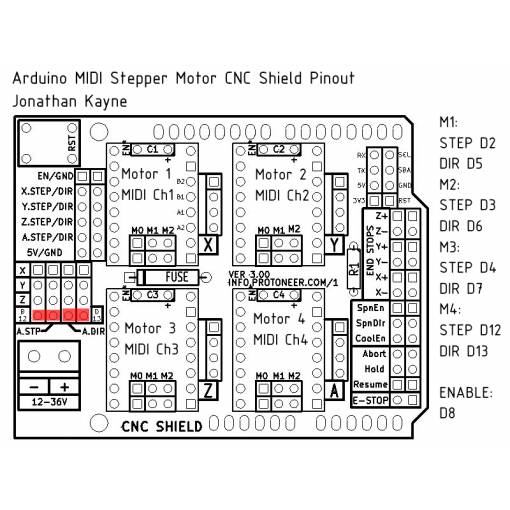
UNO az Arduino---------------------- bővítő kártyához.
8 ------------------------ EN ( léptetőmotor meghajtó engedélyezése , aktív alacsony )
7 ----------------------- Z.DIR (Z -tengely irányvezérlés )
6 ----------------------- Y.DIR (Y -tengely irányszabályozás )
5 ----------------------- X.DIR (X -tengely irány vezérlés )
4 ---------------------- Z.STEP (Z -tengelyes léptető vezérlés )